ヒトシミュレータの研究内容
【研究目的】 より実践的な実習環境を目指して
1.研究背景
歯学部学生はまず下写真のような基礎教育実習用ファントムと呼ばれるマネキンのような頭部に,実際に切削可能な歯列モデルを取り付けた静的なモデルで実技実習を行う.
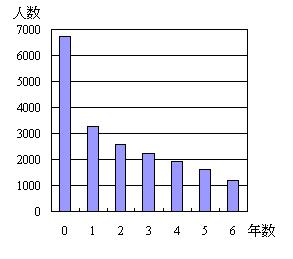
 この実習用ファントムは,自律的な動作は行わず,無機質な外観で再現性も低い.そのため,学生は患者を教材として扱ってしまい,本来,ヒトに対しては絶対に行われることのない行為が行われ,学生は誤った治療技術を取得してしまう可能性が極めて大きい.卒業前臨床実習では以前,医師の監督のもと実際に学生が患者に治療を行う参加型の実習により,技術力向上がなされていた.しかし,現在は医師免許を持っていない学生が,教育のためとはいえ実際に患者に対して治療を行うことは,倫理上問題があるという社会的な考えの変化により,見学型の臨床実習になっている.加えて国家試験も,以前はボランティアの患者に対して実際に治療を行い,技術力を判定する実技試験が行われていた.しかし,現在はこの試験での患者への治療も倫理上の問題から行えなくなってしまったため,事実上,医師国家試験は筆記のみで行われている.よって,歯科医師は医師免許を取得した後に,初めて患者を治療することになる.その結果,医師免許取得直後の歯科医師による治療中の事故が多い.右のデータは医科に限ったものであるが,歯科に関しても同様の結果が出ると予想される.
この実習用ファントムは,自律的な動作は行わず,無機質な外観で再現性も低い.そのため,学生は患者を教材として扱ってしまい,本来,ヒトに対しては絶対に行われることのない行為が行われ,学生は誤った治療技術を取得してしまう可能性が極めて大きい.卒業前臨床実習では以前,医師の監督のもと実際に学生が患者に治療を行う参加型の実習により,技術力向上がなされていた.しかし,現在は医師免許を持っていない学生が,教育のためとはいえ実際に患者に対して治療を行うことは,倫理上問題があるという社会的な考えの変化により,見学型の臨床実習になっている.加えて国家試験も,以前はボランティアの患者に対して実際に治療を行い,技術力を判定する実技試験が行われていた.しかし,現在はこの試験での患者への治療も倫理上の問題から行えなくなってしまったため,事実上,医師国家試験は筆記のみで行われている.よって,歯科医師は医師免許を取得した後に,初めて患者を治療することになる.その結果,医師免許取得直後の歯科医師による治療中の事故が多い.右のデータは医科に限ったものであるが,歯科に関しても同様の結果が出ると予想される.
以上を踏まえると,歯学教育は知識偏重型になっており,大半の治療技術を身につける実習用ファントムを用いての実習では,正確な治療を行うための技術の取得は難しい.
このことからも,歯科治療を十分に疑似体験できるシミュレータとして,動的な全身モデルの患者ロボットの開発が望まれている.
2.ロボット概要
基本設計

歯科実習用のロボットのため,多くの自由度が顔・口にあります.またシリコーンゴムなどを使用した人工皮膚を用いることで,歯科実習において必要なヒトの頬の硬さを再現しました.
ロボットの駆動には全て空気圧を用いています.空気圧を用いることで,ロボットの動作に適度な柔軟性が生まれ,より実際の患者の動作に近い動作を再現することが出来ます.
口内は完全な防水構造となっているため,水を利用した切削を行うことが出来ます.また歯は取替え可能となっているため,切削した歯を取り替えることで何度でも練習することが出来ます.
また本ロボットは歯科医療用のユニットとは完全に独立した構造のため,ロボットを移動して使用することも出来ます.
動作・機能
本ロボットは舌の動作・首の動作・口の開閉など歯科治療中に重要となる動作を行なうことが出来ます.また各種センサを用いることで,患者が治療中に起こしうる行動を自動で実行することが出来ます.例えば治療器具が喉付近に接触するとロボットが自動で嘔吐動作を行います.これにより臨場感のある歯科実習を行うことが出来ます.
更に,治療中の患者のくしゃみや首を突然振る行為など,危険な事態になりうる不意の動作をロボットに行なわせることが出来ます.学生はこれらの経験を積むことでより安全な歯科技術を身につけることが出来ます.
ロボットの動作は制御用PCからマニュアルで制御することも出来ます.

実習システム

実習中,監督医師は制御PCインターフェイスによって患者ロボットの操作と実習生の評価を行います.ロボット自身が自動的な動作を行うため,監督医師の操作は少なくて済みます. また自習中には記録用のカメラが設置してあり,自身の内容を後から確認することも出来ます.
ロボットの眼球にはカメラが埋め込まれており,患者の視点から実習確認をすることが出来ます.

実習システム
実験映像
・治療風景
・実習風景
・払いのけ動作
・内部映像